
Mobile Robotics (AI3702)
考纲分析
Part 1
Legged & Aerial
- 腿式机器人
- 点接触静步,至少需要4条腿;若同时移动两条腿则总共需要6条腿
- 步态是指机器人的每条腿按一定的顺序和轨迹的运动过程(the distinct sequence of lift and release events of the individual legs)
- k 条腿机器人步态数 \(N=(2k-1)!\)
- 能耗大于轮式机器人
- 空中机器人有比空气轻(LTA)和比空气重(HTA)两种
运动学 & Wheeled
- 运动学是物理学的一个分支,在经典力学中发展起来,描述点、物体和物体系统的运动,而不考虑导致它们运动的力
- 运动学坐标:Global 下标为 I,Local 下标为 R
- 常见轮子种类与应用
- 标准轮:广泛应用于自行车、汽车等交通工具
- 小脚轮:常用于需要轻便、快速移动的设备,如电动车、滑板车、购物车
- 瑞典轮:常用于全向移动机器人,如天王星(Uranus)机器人
- 球形轮:早期鼠标的重要部件之一。在机器人领域,球形轮可用于构建全向运动系统
- 标准轮约束方程

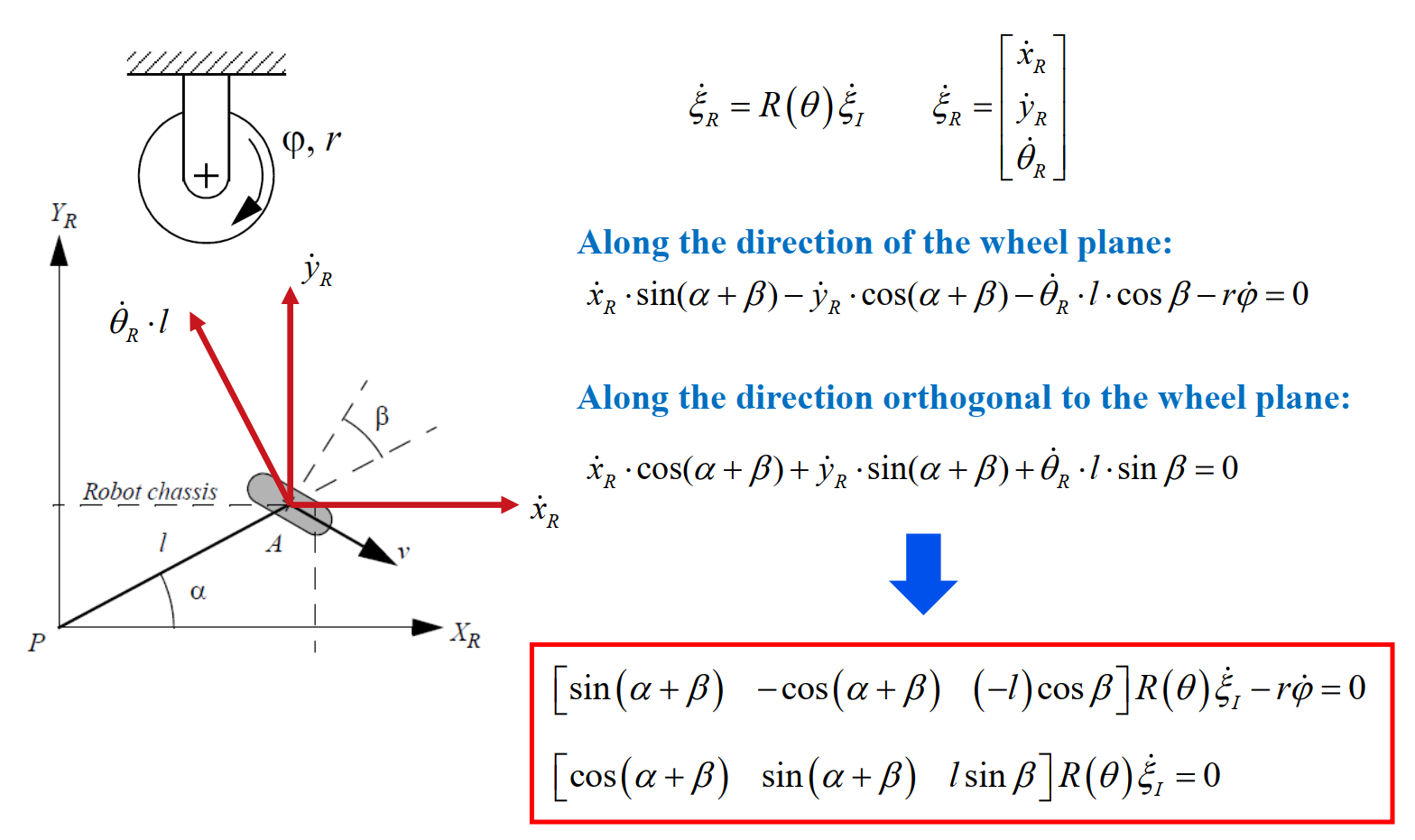
⚠ 注意此处沿机器人方向建立全局坐标系
- 旋转矩阵 R 将 global motion 映射到 local motion
机动度
- 移动机器人三种基本特性:Maneuverability (机动度) = Steerability (可操纵度) + Mobility (可移动度)
- 可移动度:通过控制轮子的速度可以实现的移动自由度,可用瞬时旋转中心(ICR)判断
- 可操纵度:有几个/几组能自由转向的轮子
传感器
- 传感器分类:
- Proprioceptive/exteroceptive(本体感受/外部感受)
- Passive/active(无源/有源)
- 常见无源:红外、压电
- 激光传感器与相机优劣势分析
- 激光:精度高,响应快,抗干扰能力强,但对物体表面特性敏感,测量范围有限,价格较高
- 相机:能获取丰富的视觉信息,价格较低,但测量精度低,易受环境光影响,数据处理算法复杂
- 传感器基本特性:分辨率,线性度,带宽,灵敏度,交叉灵敏度,误差,准确性,精确度,系统误差,随机误差
- 常见测距仪及其原理:
- 光学编码器:通过脉冲频率确定旋转速度
- 指南针:地磁场
- 陀螺仪:角动量守恒
- 加速度计:牛顿定律+电容
- IMUs(惯性测量单元):集成加速度计、陀螺仪等传感器
- GPS:卫星信号定位
- 直线提取特征的三个主要问题:
- 有几条线?
- 哪些点属于哪条线?
- 给定属于一条直线的点,如何估计直线参数?
- 主要提取方法:分裂-合并法(对初始划分敏感,计算量大),直线回归法(对异常值敏感),增量法(误差积累),期望最大化(EM),霍夫变换(基于投票),随机抽样一致性(RANSAC)
Part 2
地图表示与构建
- 常见的四种表示方法:
- 点云,存储要求高
- 栅格,可用 AStar 规划路径,可用四/八叉树(面向二/三维空间)降低存储空间
- 特征,几何特征明显
- 拓扑,点+线,路径规划快,但节点稀疏,可能导致定位错误
- 定位问题分类:位置跟踪、全局定位(初始位置未知)、绑架机器人问题(极端相似)
- 位置更新的2个步骤:预测更新(本体感知推断)、感知更新(外部感知矫正)
规划和导航
- 导航方式:
- 有人工标识的固定路径导引
- 有人工标识的无固定路径导引
- 无标识导引的自然无轨导航
- 导航问题分解:
- 路径规划
- 避障规划
- 轨迹生成
- 势场法问题:存在局部最小,容易产生振荡和死锁。产生原因:某个位置吸引力和排斥力相互抵消,合力为零
- RRT优点:概率完备,快速扩展
- RRT缺点:计算量大,路径曲折
- AStar缺点:占用大量内存,无法处理动态地图
- 向量直方图法:根据环境详细栅格地图构建机器人坐标系下障碍物概率直方图,根据概率直方图评估选择最优运动方向,可以有效避免势场法的局部极小值问题
- 轨迹规划:给定路径与约束,生成一组控制序列
- 机器人导航所需技术:感知,建图,定位,路径规划,控制